
[Optical Flow/07] Flow Map (Vector/HSV)
This post is written by YoungJ-Baek
You can see the original Korean version at Searching Fundamental
Preface
In the previous post, we covered Epicflow as the last Handcrafted method. While discussing Epicflow, we introduced a different type of Flow Map without much explanation. Up until now, the Flow Map (Vector Map) has been represented by vectors (arrows). However, even if we densely calculate Optical Flow using vectors, we can only draw a sparse Flow Map using vectors.
On the other hand, if we represent vectors with colors, as shown in the image below, we can represent vectors for all pixels. In Optical Flow, we use an HSV color map rather than the commonly used RGB.
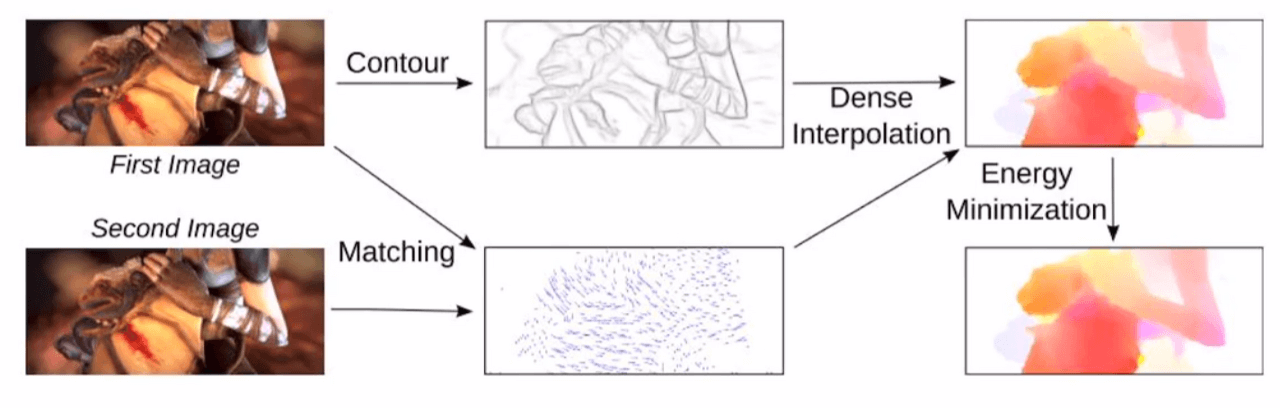 Architecture of EpicFlow
Architecture of EpicFlow
HSV Vector Map
As mentioned in the introduction, Vector Maps have poor visual appeal and cannot be represented densely. Therefore, Optical Flow Maps are often represented using an HSV Map. First, let’s take a look at what an HSV Map is. The difference between an HSV Color Map and the RGB Color Map that we commonly use is as follows:
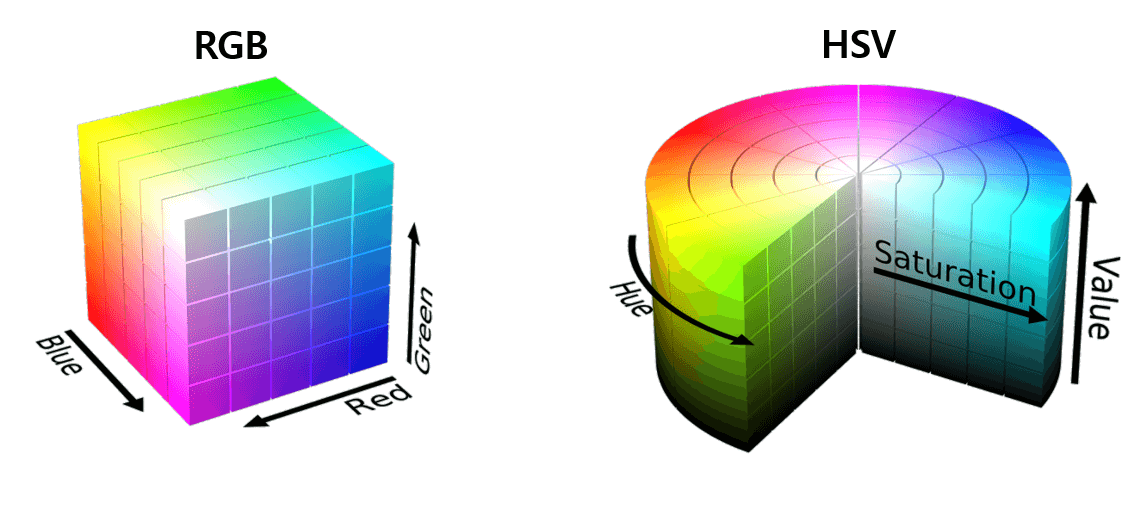 Difference between RGB and HSV Color Map
Difference between RGB and HSV Color Map
Unlike RGB, which combines Red (R), Green (G), and Blue (B) to represent all colors, HSV uses a combination of Hue (H), Saturation (S), and Value (V) to represent colors. Each component represents color, saturation, and brightness information, respectively. So how can we use HSV maps in a flow map? Each component of the HSV map plays the following roles:
- H (Hue): color information, direction of motion vectors
- S (Saturation): saturation information, size of motion vectors (darker colors mean larger vectors, lighter colors mean smaller vectors)
- V (Value): brightness information, not used in the flow map.
The following is a concept image that corresponds Vector Map to HSV Map.
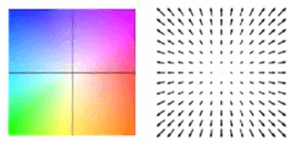 Relationship between Vector Map and HSV Map
Relationship between Vector Map and HSV Map
Leave a comment